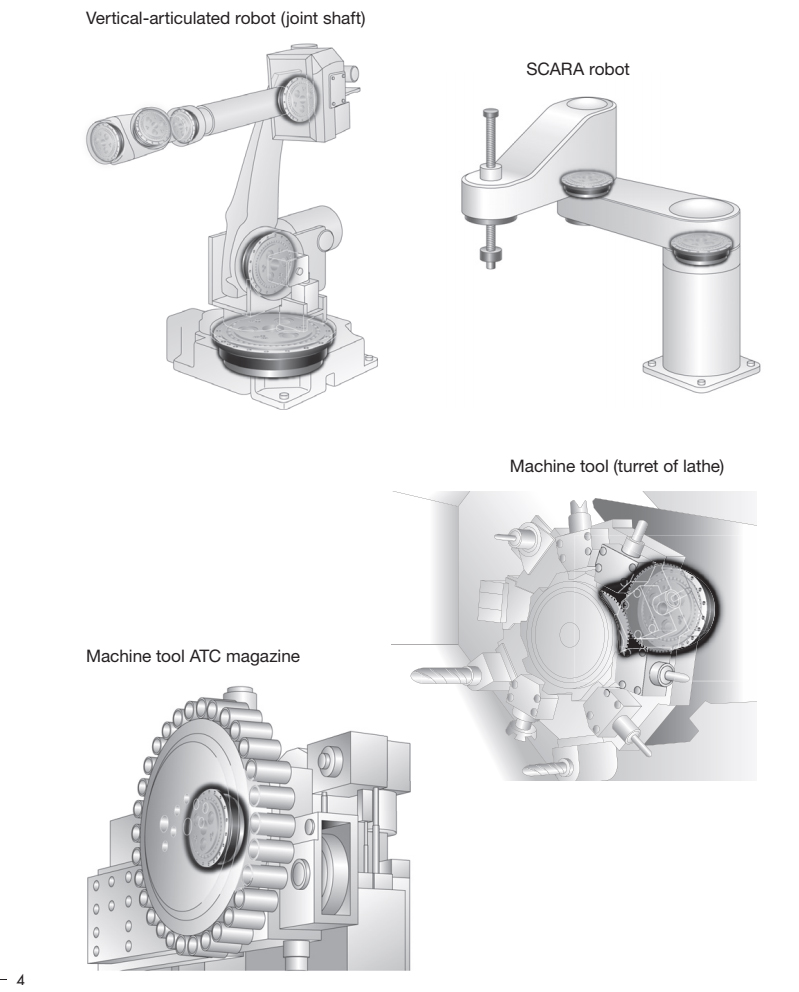
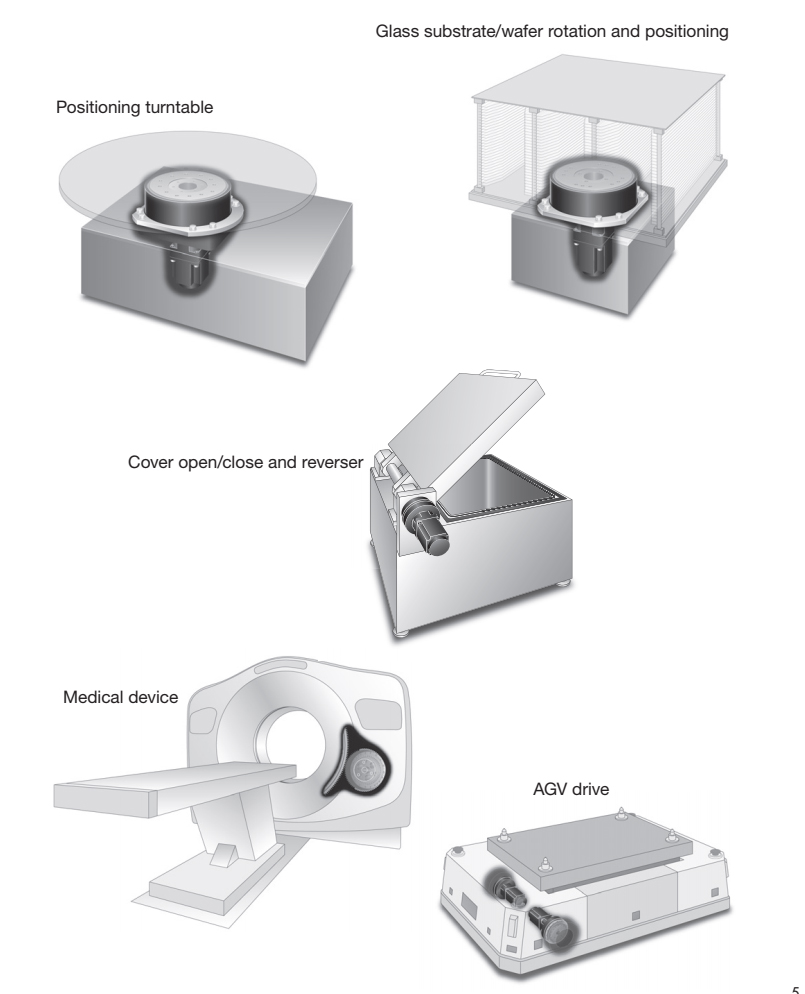
robota precizitātes reduktors

Izmēri: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
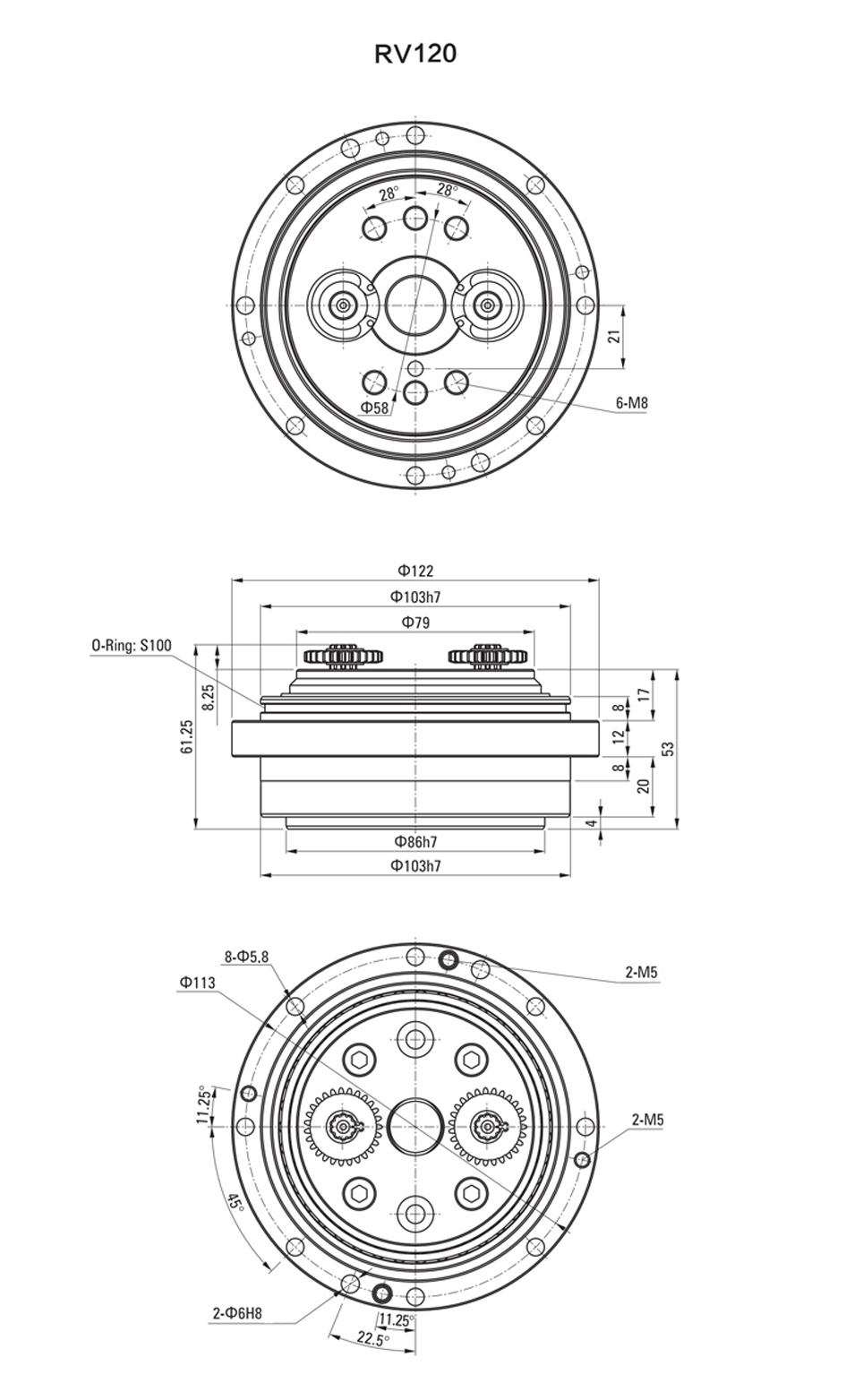
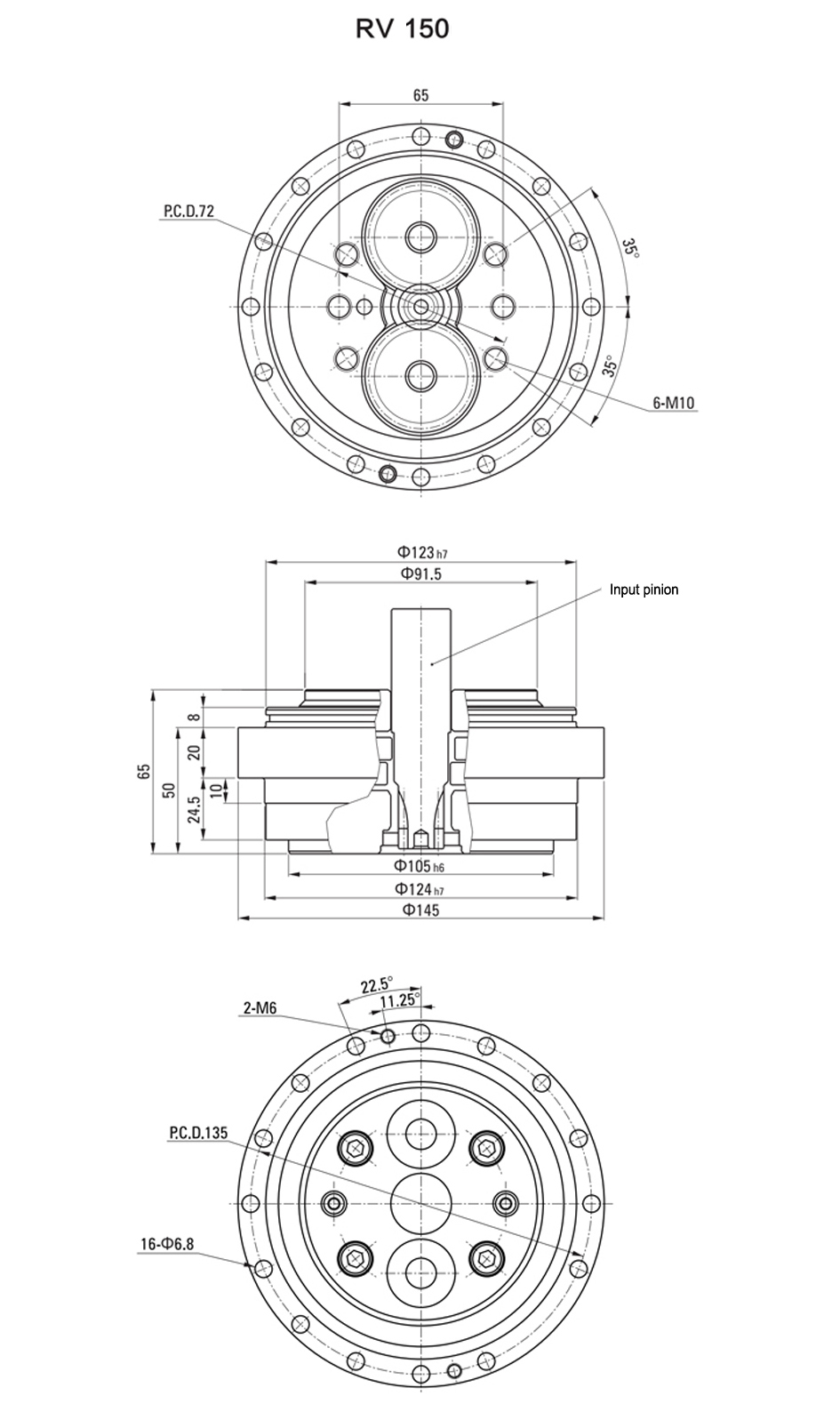
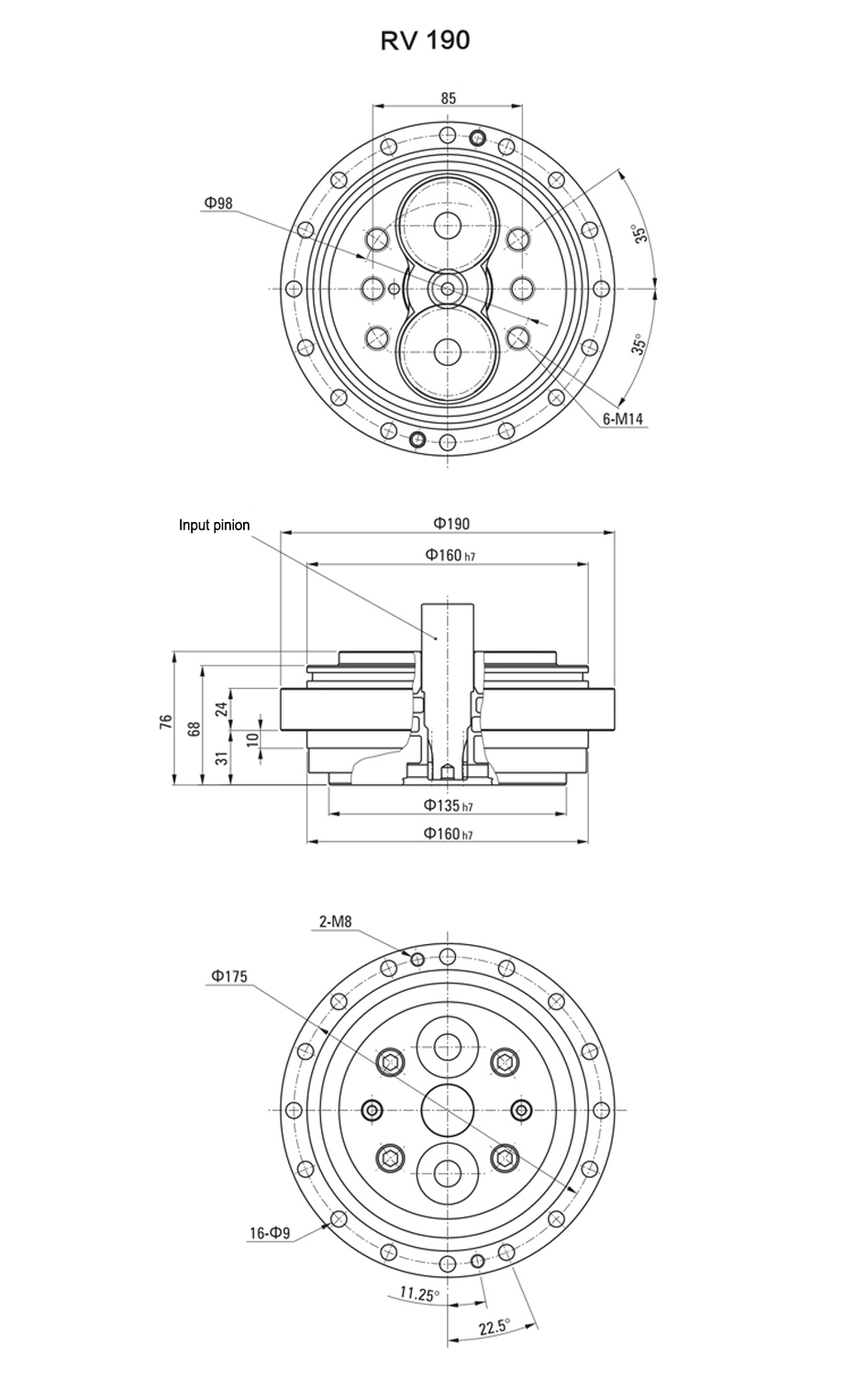
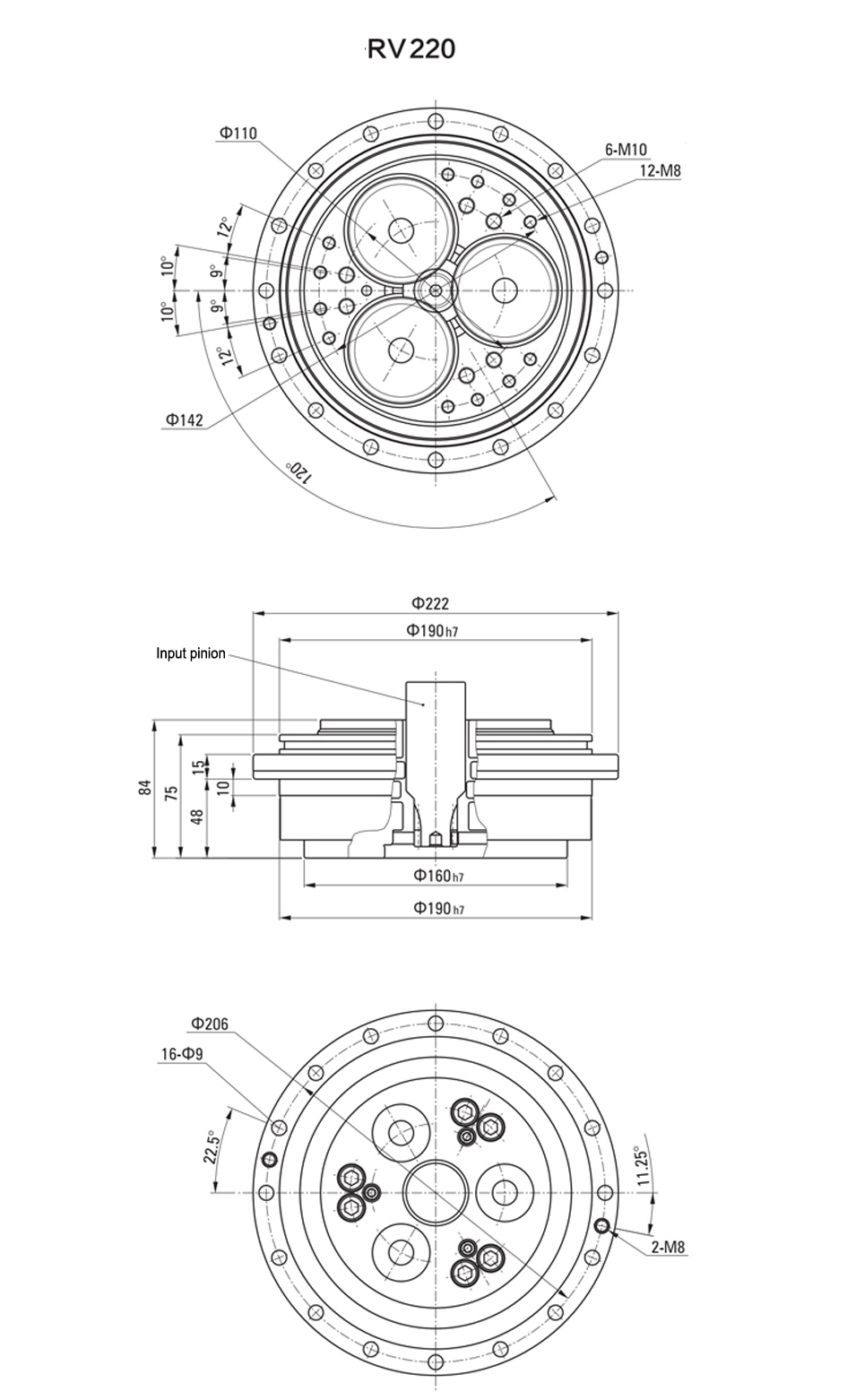
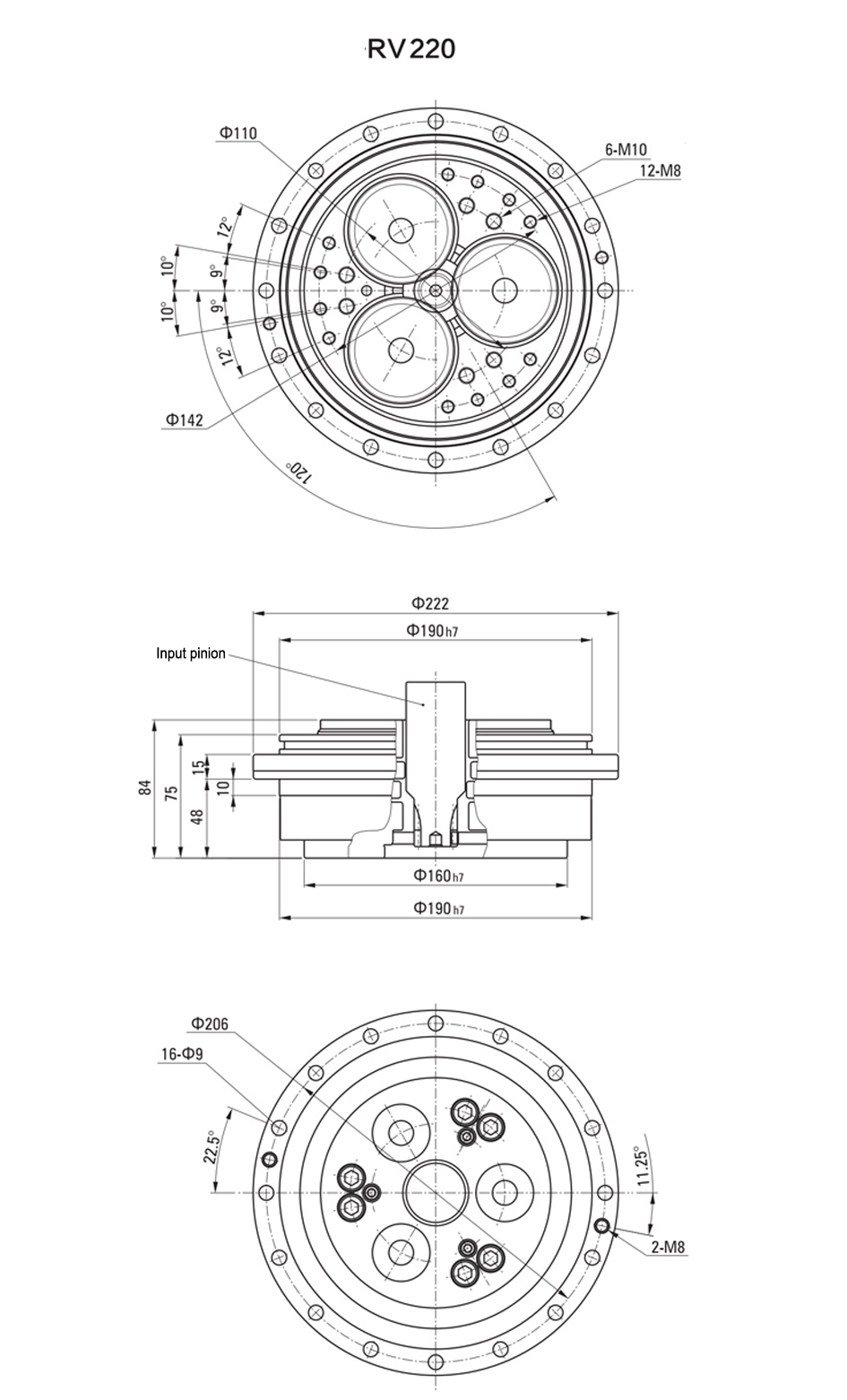
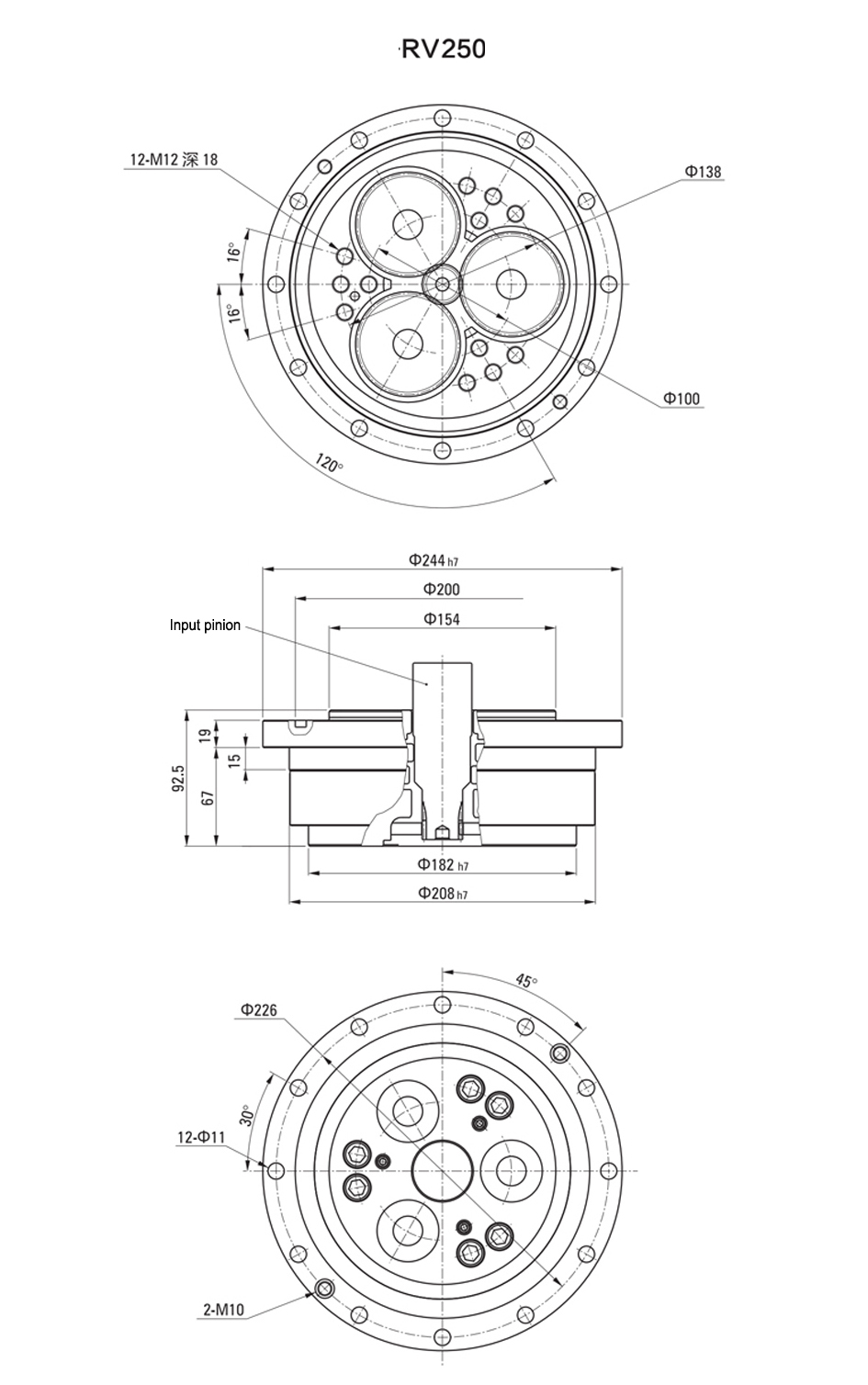
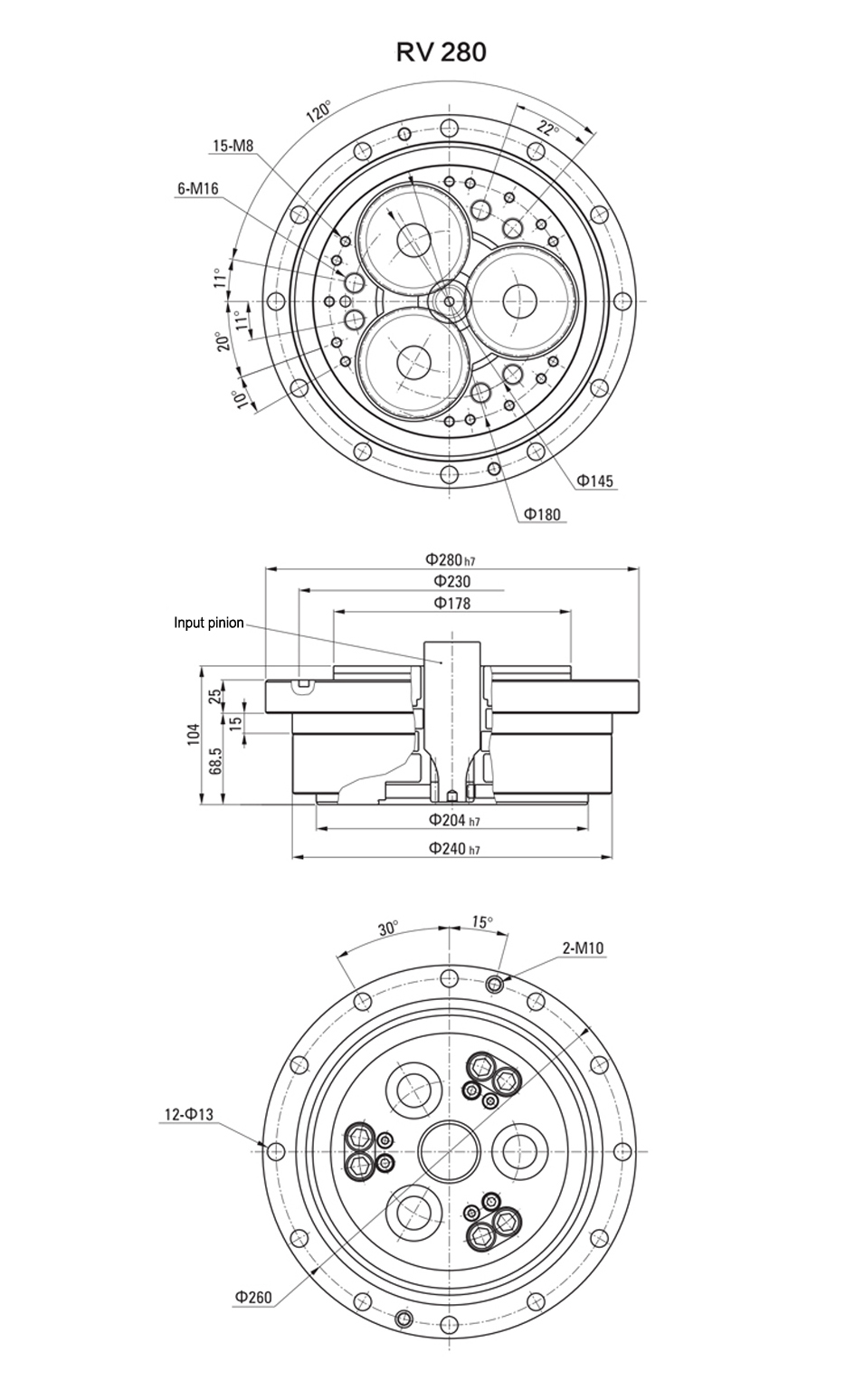
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
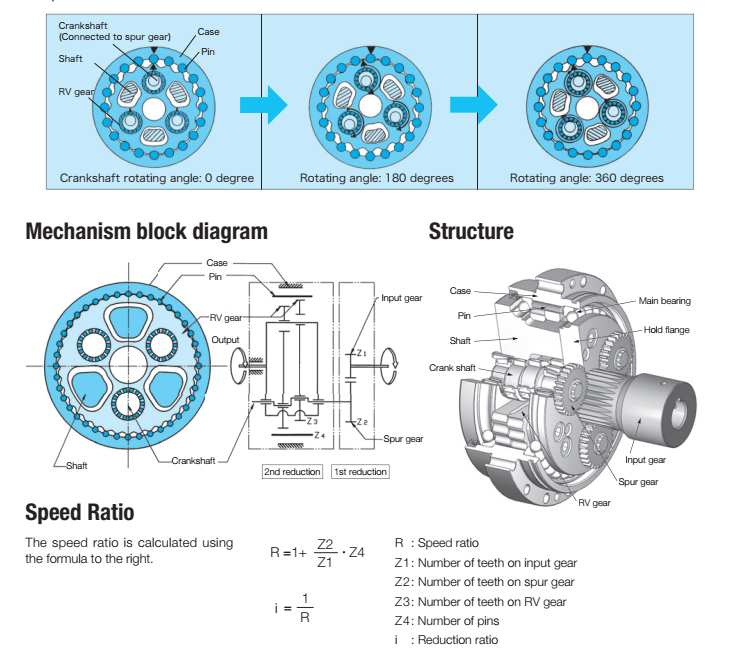
• 1. pakāpes zobratu pārnesumu samazināšana
Ieejas zobrats ieslēdzas un griežas ar zobratu zobratiem, kas ir savienoti ar kloķvārpstām. Izvēloties dažādus pirmās pakāpes pārnesumus, var nodrošināt vairākus pārnesumu skaitļus.
2. posms Epicikliska pārnesumu samazināšana
• Kloķvārpstas, ko darbina zobratu pārnesumi, izraisa divu epiciklisku pārnesumu ekscentrisku kustību, ko sauc par RV pārnesumiem, kuri ir nobīdīti par 180 grādiem viens no otra, lai nodrošinātu līdzsvarotu slodzi.
• RV pārnesumu ekscentriskā kustība izraisa cikloidālas formas zobratu saķeri ar cilindriski veidotām tapām, kas atrodas ap korpusa iekšējo malu.
• Viena kloķvārpstas apgrieziena laikā RV pārnesuma zobi pārvieto vienas tapas attālumu pretēji rotējošo kloķu virzienam. RV pārnesuma kustība ir tāda, ka zobi paliek ciešā saskarē ar tapām, un vairāki zobi vienlaicīgi dala slodzi.
• Izeja var būt vārpsta vai korpuss. Ja korpuss ir fiksēts, vārpsta ir izeja. Ja vārpsta ir fiksēta, korpuss ir izeja.
Visi pārnesumi ir karbonizēti ar lielu slodzi, zemu troksni, zemu vibrāciju, zemu inerci un ilgu kalpošanas laiku, augstu precizitāti zemai novirzei rotācijas virzienā. Zemas izmaksas visam lietojumam.
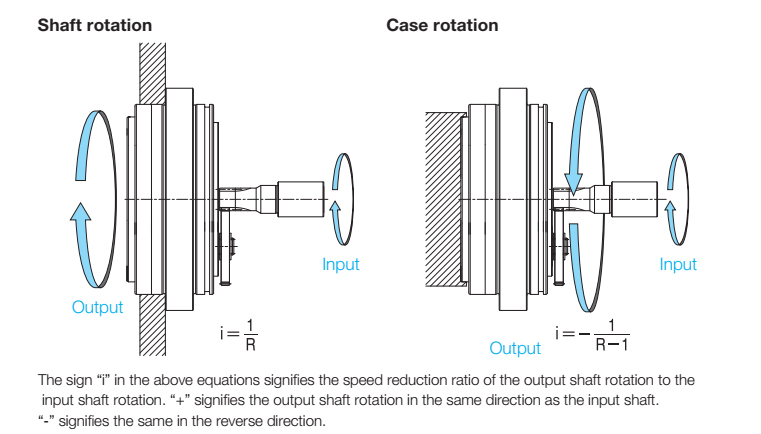
Rotācijas virziens un pārnesumu attiecība
Vērtējums: 41 81 102,17 102,81 107,66 125,21 126 137 156 164,07 141 145,61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 192,75 105 118 142,44 159 183 203,52
Produkta kods
Kopējais ātruma koeficients i (pirmajā un otrajā samazināšanas pakāpē) atšķiras starp vārpstas rotāciju un korpusa rotāciju, un to var aprēķināt pēc ātruma attiecības.